はじめに
DCモーターを12Vで回していたところ、
負荷をかけると回転が不安定になり、電圧表示が7V付近まで落ちる現象が起きた。
「電圧は圧力(電流を流そうとする力)なんだから、一定のはず。なのになんで負荷をかけるとおおもとの電圧が下がるんだろう」
そう思って調べていくと、考え方そのものがズレていたことに気づいた。
今回は、
DCモーターに負荷をかけるとなぜ電圧が下がるのか
自分なりに調べた内容をまとめておく。
かなり初歩的な内容なのでご容赦。
実験で生じた謎
無負荷状態
DC12V → 問題なく回転
負荷をかける
回転がとぎれとぎれになる
電源の表示電圧が約7Vをうろうろ
結果として、モーターは安定して回らなかった。
この結果が腑に落ちなかった。
負荷をかける→モーターが止まるのは理解できるが、電圧はポンプの出力と考えると、回路の端でモーターが止まるという現象が、出力に影響するのがいまいち理解できなかった。
モーターの性質
DCモーターについて調べてみると、こちらのサイトが非常にわかりやすかった。
 https://techweb.rohm.co.jp/trend/column/841/
https://techweb.rohm.co.jp/trend/column/841/
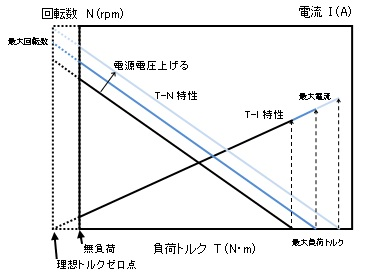
細かい前提は上記サイトに書いてあるが、DCモーターの特性は、上記のようなグラフになる。
これは、回転数が下がると、発電量(逆起電力)が減ることから、多くの電流をモーターが要求することに起因している。
つまり、負荷トルクがゼロの場合(左)、回転数は最大になり、電流も最小になる。
逆に負荷トルクが上がると(右)、回転数が下がり、電流が上がる。
この負荷が上がり、電流が上がるというのが実験で生じていた現象であろう。
ではここで、なぜ電圧が下がったのだろう。
電源での挙動
使用したコンバータは、定格が3Wである。
P=V×I
であるので、電流Iが上がると、発熱を伴い破損する可能性があるため、電源側が電圧を下げることで電流を減らそうとしている。
この結果、電源の電圧は下がってしまったということになる。
強化すべきは電源なのか
これまでは、
止まっちゃう=高トルクが必要=じゃあもっと強いモーターにしよう
という思考の流れだったが、電源側の弱さが今回は出てしまっているということだろうか。
つまり、モーターより先に、電源の扱える電力を上げれば、今回のモーターも動かすことができるということだろうか。
例えば、今使っているPCのACアダプタは、家庭用コンセントの入力に対し、出力はDC19V 3.42A 65Wである。
だが、電流と電圧の関係は、抵抗によって変わるはずなのに、アダプタにすでに電流と電圧がこのように書かれているということは、ここまではかけられるという能力であろう。
よって、電源を上げると、今度は過電流が流れてしまい、モーター側が壊れてしまうことが予想される。
どちらにせよ、今使っている定格3Wの電源では、弱すぎるという結論だろう。
しかし、弱すぎるおかげで、モーターを壊すことや発火しなかったも言える。
一言
理屈ではわかったが、完璧に腑に落ちない感じがする。
小学校理科の知識が正直基準のため、電圧と電流、電力の理解が多分ゆがんでいるのだろう。
ちょっとした認識のずれが、近寄りにくさを感じていると思うが、今日は疲れたのでここまで。